
self-driving_01_intro
概述
“A self-driving car, also known as a robot car, autonomous car, or driverless car, is a vehicle that is capable of sensing its environment and moving with little or no human input.” – wikipedia
无人驾驶技术路径
- 无人驾驶分级
- L2/L3自动驾驶
- L4自动驾驶
无人驾驶分级
美国汽车工程师协会SAE,将自动驾驶分为6个级别L0~L5。
责任主体在于驾驶员:
L0:纯人工
L1:巡航定速(Adaptive Cruise Control, ACC),巡航装置可以纵向控制车辆,加速减速。
L2:车道保持辅助(Lane Keeping),系统可以纵向控制,也可以横向控制汽车,但是人仍为主导。(特斯拉)
L2.5:在简单路况下的变道能力。
责任主体在于汽车:
L3:在L2基础上提供变道能力。
L4:相当于全无人驾驶,大部分时间由车主导。
L5:驾驶能力几乎与人类没有关系,没有方向盘、脚踏板以及其他接管设备。
L2级别无人驾驶
代表:Tesla Model X
- L2高级辅助驾驶
- 驾驶员需要对安全负责
- 启动条件要求不高(速度和车道线)
- 早期采用Mobileye提供感知技术
- 无法解决复杂路口问题
- 主动变道需要人提供变道指示
L3级别无人驾驶
代表:Audi A8
- L3自动驾驶
- 自动驾驶期间,车辆负全责
- 进入自动驾驶的条件苛刻(多车道路,60km/h以下速度,天气良好)
- 量产车里智能性最好的
- 暂时没有主动变道能力
- 遇到紧急情况或者不符合条件的情况需要通知驾驶员接管,10s时间。
L4级别无人驾驶
代表:Waymo
- L4全自动驾驶
- 曾有一段时间取消了安全员
- 商业运营阶段
- 世界最领先的自动驾驶能力
- 成本昂贵
代表:Nuro
- 特殊场景下的Level 4能力
- 物流配送车
- 成本要求不能太高
- 可以不用考虑乘坐体感
- 相关物流公司都有布局,比如:京东、美团、菜鸟等等
实现思路:
- V2X:Vehicle to Everything(车路协同)
- V2V:Vehicle to Vehicle
- V2I:Vehicle to Installtion
- V2P:Vehicle to people
- 边缘计算:RSU(路侧单元)、OBU(车载单元)
- 5G通信能力:LTE-V协议,专门针对车间通讯的协议,可兼容4G和5G
- 主车智能:深度学习
- 感知能力:高度复杂冗余的传感器
- 决策能力:大数据下的智能决策
- 高精地图:丰富的地图信息数据
- 定位:精确的位置获取能力
- 权责问题处理:RSS模型(Responsibility-Sensitive Safely)责任敏感安全模型:利用可衡量的具体数据来区分事故的责任
无人驾驶技术概述
- L4自动驾驶系统架构
- 自动驾驶硬件
- 自动驾驶软件
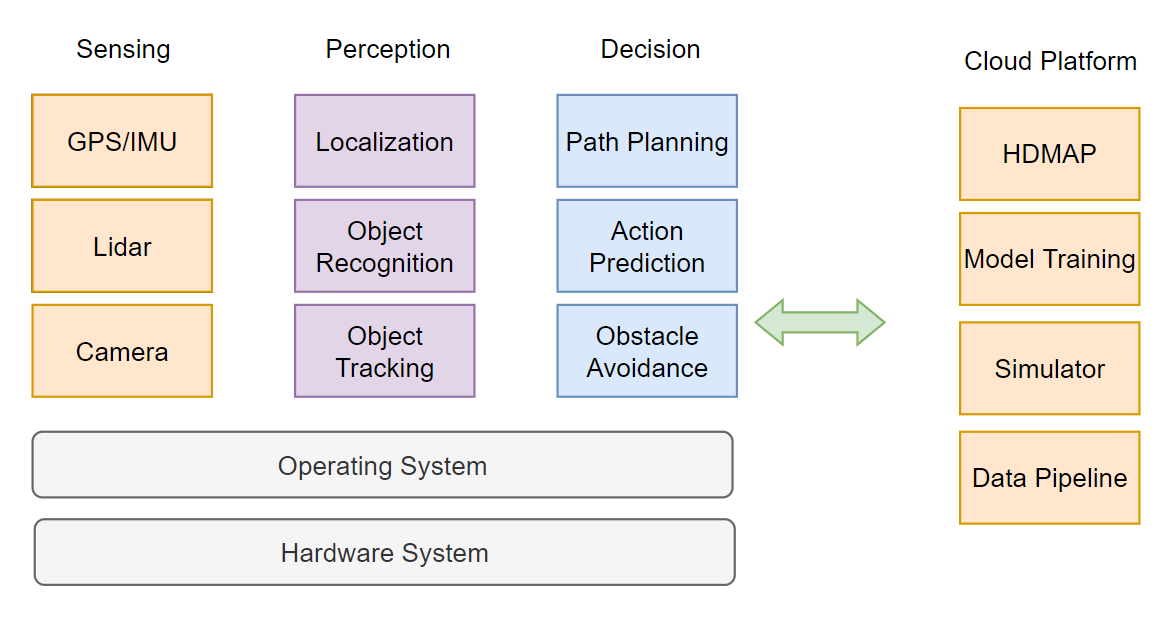
L4自动驾驶系统架构
自动驾驶硬件
- 128L LiDAR + 若干 16L LiDAR 辅助盲区,激光雷达平行偏下的感知范围
- Front Cameras + Side Cameras
- Radar 毫米波雷达,弥补光线不足时的感知能力
- Industrial PC 工控机
- IMU + GPS Antenna + GPS Receiver 定位
感知传感器
- 摄像头:物体识别、追踪
- 激光雷达:障碍物位置识别、绘制地图、辅助定位。精准度很高,作为主传感器
- 毫米波雷达:坏天气下辅助感知物体的位置和速度,观测距离远,但容易误检
- 超声波:近距离高敏,作为安全冗余设备检测车辆的碰撞安全问题
定位系统传感器
- IMU:实时监测自身的姿态,200Hz或更高。包括了三个单轴的加速度计和三个单轴的陀螺仪。
- GNSS:GPS,无人车一般使用RTK(载波相位差分)来实现定位,10Hz
计算单元
车载计算单元IPC:
- 高效连接计算单元内部各计算设备,连接外部传感器的信息输入和存储
- 冗余设计,防止单点故障
- 考虑车规、电磁干扰和震动方面的设计以及ISO-26262标准的要求(ASIL D级别,故障率是10FIT,10亿各小时里面出一次故障)
车辆线控系统
- 线控系统:控制是由简单命令完成的,不是由物理操作。
- 将传统车辆的液压系统和真空助力泵 设计为 电控化的零部件。
自动驾驶软件
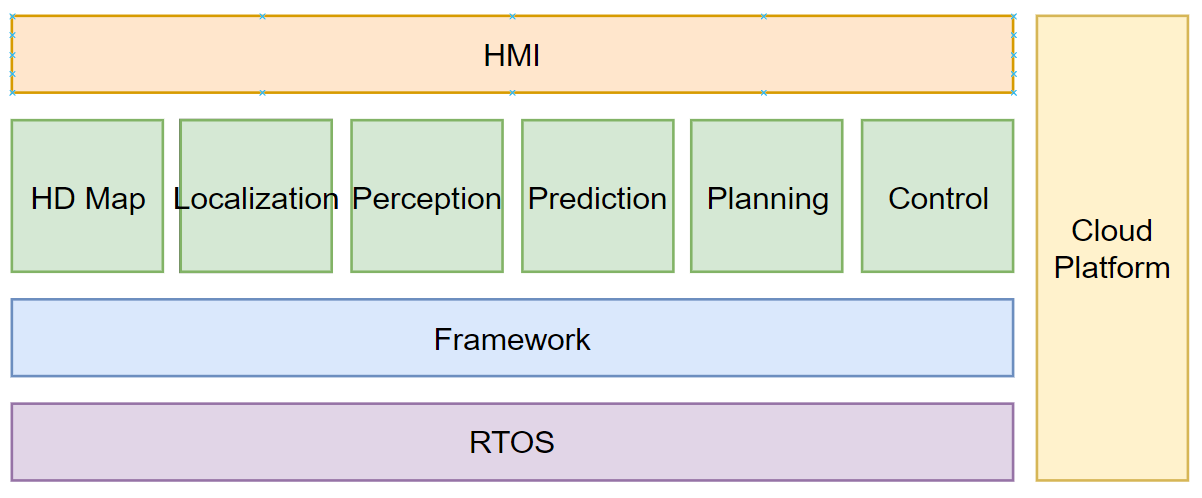
- RTOS 实时操作系统
- Framework 框架
- 各类模块
- HMI 可视化
- Cloud Platform 云平台
感知系统(Computer Vision + Sensor Fusion)处理后,传递信息给定位系统(Localization),按照信息进行路径规划,最后控制系统执行行驶指令。
RTOS
- 实时操作系统
- QNX,类Unix系统,具有强实时性,符合车规级的实时操作系统
- RT Linux,Linux内核补丁,通过软实时进行监控
- Framework:
- ROS,机器人操作系统:B->M
- YARP、Microsoft Robotics、MOOS、Cybertron
HD Map
High Dimensional Map 作为其他模块的支撑
- 不同于导航地图,最大的特点就是高纬度和高精度
- 道路网的精确三维表征,例如交叉路口布局和路标位置
- 地图语义信息,例如道路速度限制,左转车道开始的位置
- 导航地图只能达到米级精度,高精地图能达到厘米级
- 高精地图坐标系:WGS84、墨卡托坐标系
- 提供许多准确的静态物体信息
- 定位可以用于计算相对位置
- 帮助传感器缩小检测范围,缩小感兴趣区域ROI
- 计算道路导航信息
- 帮助车辆识别车道的确切中心线
Localization
-
无人车最重要的基础就是位置
-
INS:Inertial Navigation System 惯性导航系统,较高更新频率
- IMU获取自身状态后通过状态矩阵递推下一时刻的位置
- 如果没有矫正的话,状态递推会随着时间不断产生误差,导致最终位置发散
-
RTK,载波相位差分系统,较低更新频率
- 多加了一个静止基站,基站位置不变,有固定坐标 $(X_{基站固定},Y_{基站固定})$ ,而基站从卫星获取到自身位置坐标为 $(X_{基站卫星},Y_{基站卫星})$ ,这二者的误差为 $Error=(X_{基站固定}-X_{基站卫星},Y_{基站固定}-Y_{基站卫星})$ ,该误差可以衡量车辆是否偏航,即汽车坐标应当在 $(X_{汽车卫星},Y_{汽车卫星}) \space ± \space Error $ 之间。
-
通过 Kalman Filter 卡尔曼滤波整合两类数据各取优势,得出高准确性的实时信息。
-
-
几何定位:
- 激光雷达:点云
- 摄像头:图像
- 高精地图
迭代最近点 ICP:每个时刻进行多次点云与高精地图位置的比对,选择最近点作为位置校正。
直方图滤波 Histogram Filter
Preception
-
任务:
-
检测:得到物体在环境中的位置
-
分类:明确物体是什么
-
跟踪:随时间的持续观察移动物体并保持物体一致性
-
分割:图像中每个像素与语义类别进行匹配,合理语义分割
-
-
方法:
- 深度学习:监督学习、半监督学习、强化学习
- R-CNN系列、YOLO、SSD
-
计算融合:
- 前融合:将数据基础信息进行融合,得到Raw Data
- 后融合:将不同传感器分别执行操作后,将数据融合
Prediction
-
任务
- 实时性
- 准确性
-
方法:
-
基于状态进行检测
- Kalman Filter
- Particle Filter
-
基于车道序列进行预测通过
- 机器学习模型化简为分类问题
-
行人预测:行人预测很难
-
Planning
- 任务
- 导航线路规划
- 精细轨迹表述
- 方法
- 数学问题转换:将物理世界的地图转化为数学上的图表达
- 最优路径搜索:通过数学上的最优路径求解出确定解
- 考虑车辆的体感和安全性
Control
- 任务
- 输入信息:目标轨迹、车辆状态,输出:方向盘、油门
- 时效性、准确性、稳定性要求都非常高
- 方法:
- 传统控制算法PID可以满足车辆控制要求,控制算法优化上由LQR、MPC
问题总结
- 我在哪?
- 我周围有什么?
- 他们要到哪里去?
- 我该怎么走?